I experiment a bit with Houdini crowds and obstacles avoidance, really simple to implement . I tried to implement in different situation and is always working fine 🙂
I tried to use on a flocking simulation and a standard biped simulations and in both case I got excellent results.
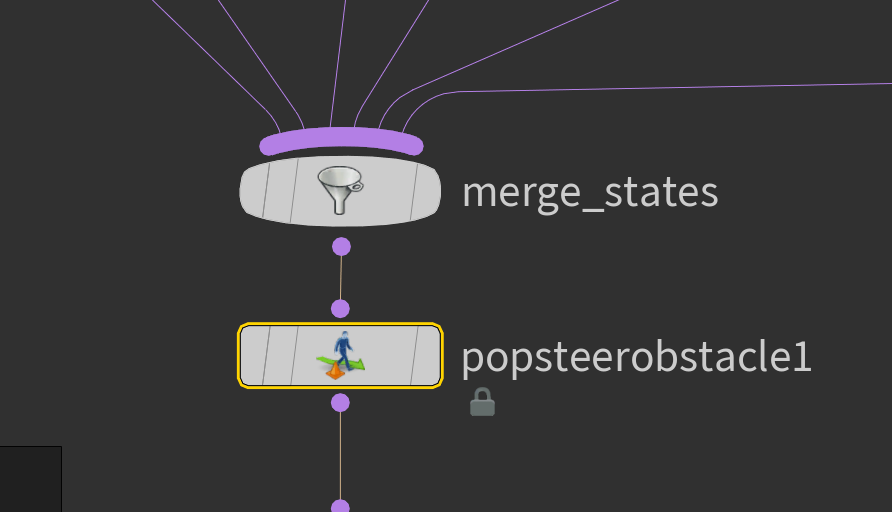
The trick is when you using DOP simulation by adding a ‘popsteerobstacle’ node , and tweak with values to get the best result it depending a lot on your agents velocity.
Here the result of the flocking test.
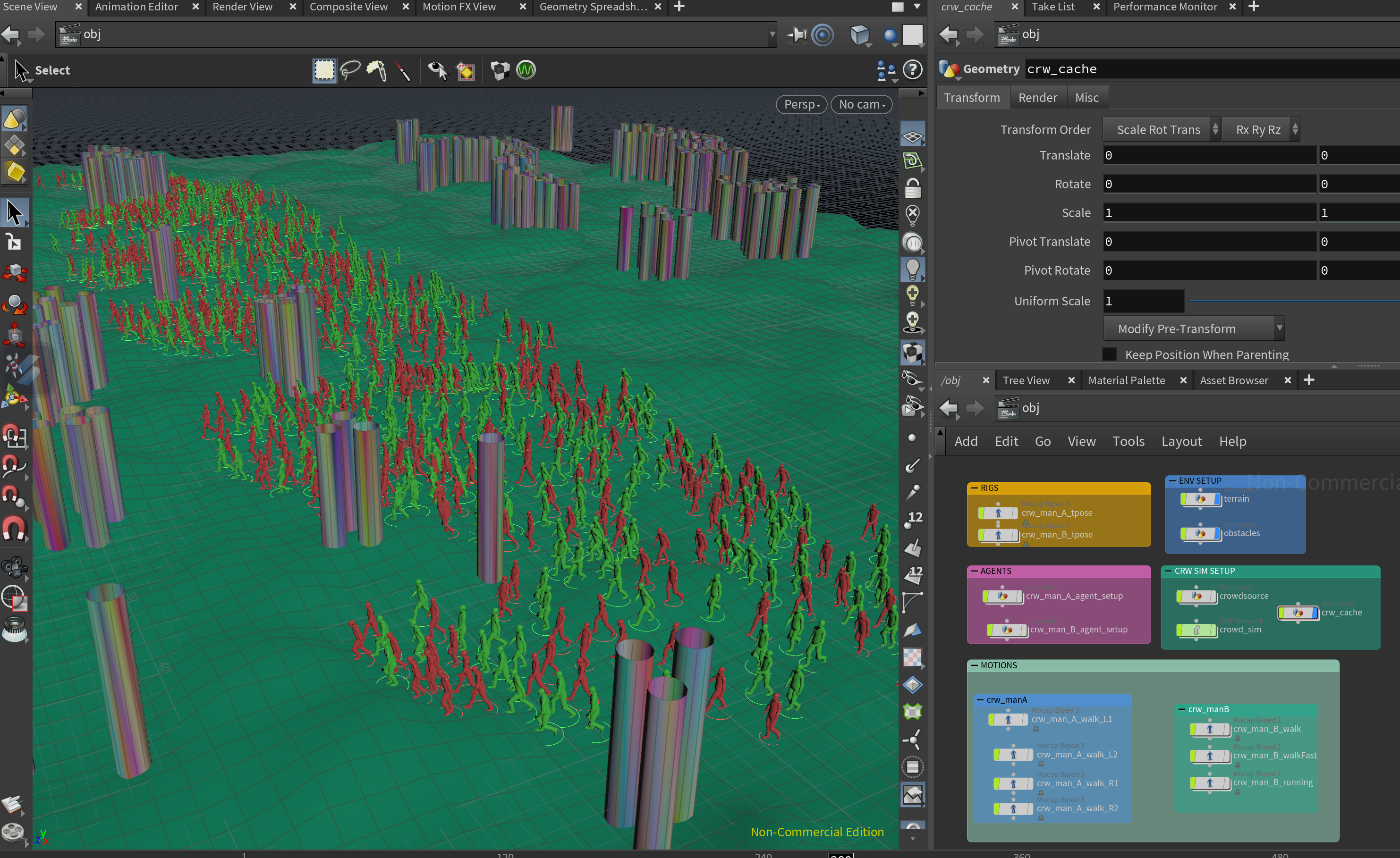
Here the result using the mocapBiped3 and mocapBiped2 using adapt terrain and locomotion.
More tips coming soon .
Cheers